Research
The main topic of our research is to develop computational intelligence, which is the center of the interest in these days. Our essential objective is to understand the concept of computational intelligence and to design intelligent systems that is compatible in this field. For this purpose, our research focuses on various fields of research such as filtering, optimization, statistical machine learning and sensor fusion which leads to various kinds of application such as intelligent vehicle or robot. So far, we have developed a fair number of intelligent systems and contributed on the related fields by making artificial intelligence be more like human. Currently, we are divided into three groups and each of them are in charge of a detailed research area.
AREA I - Vehicular Application
AREA III - Mobile Robot Application
For more information on our research areas, please see below sections.
AREA I - Vehicular Application
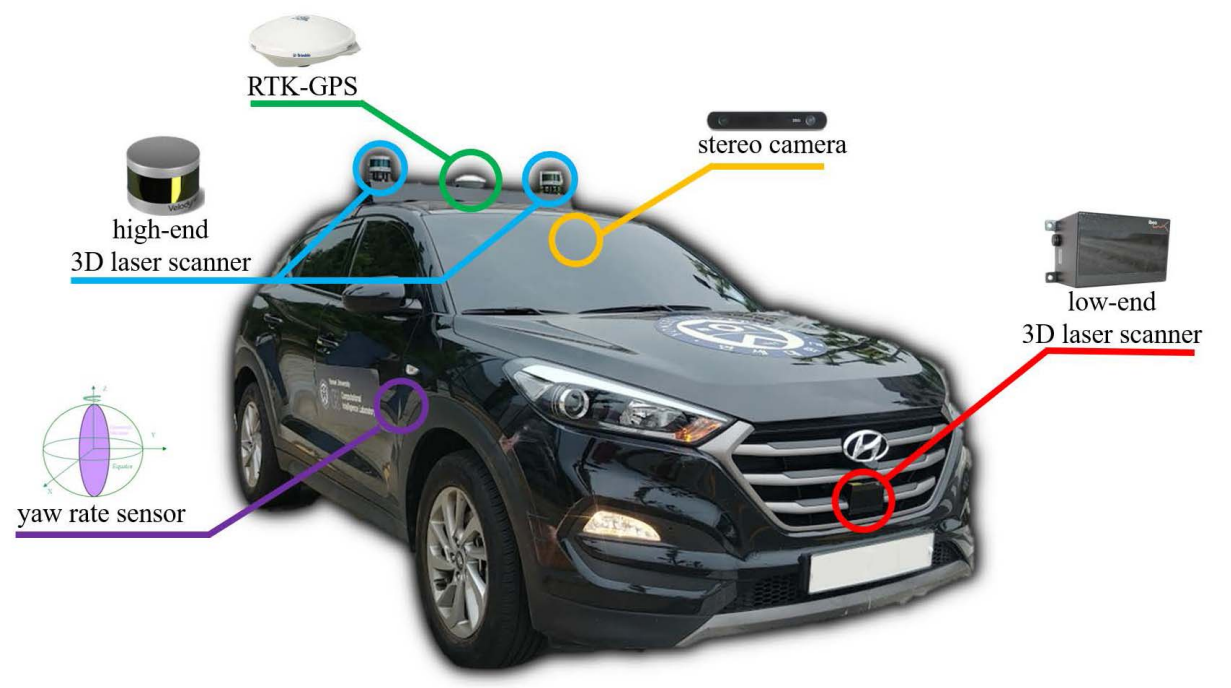
- Novel Vehicle Bounding Box Tracking Using a Low-End 3D Laser Scanner, TITS, 2020
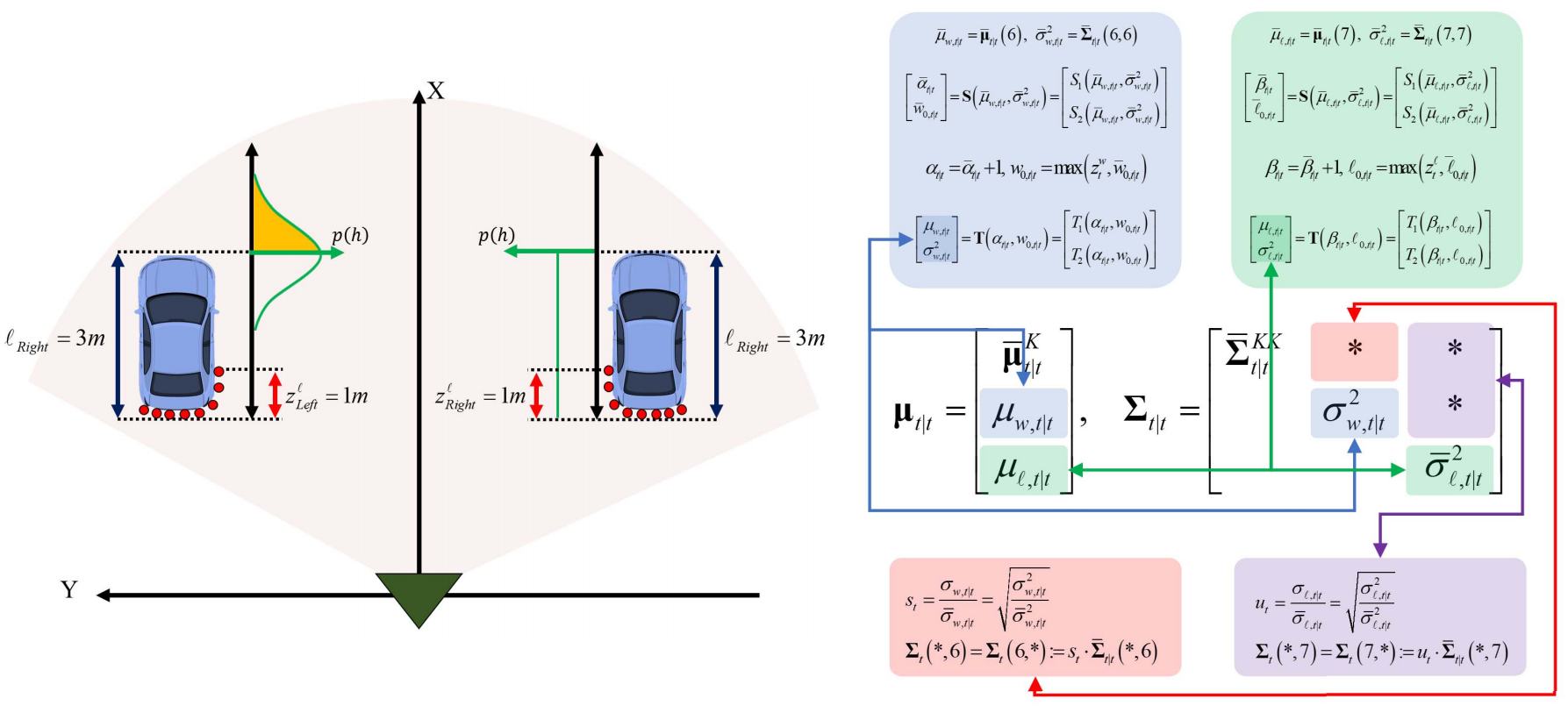
- A New Contour-Based Approach to Moving Object Detection and Tracking Using a Low-end 3-Dimensional Laser Scanner, TVT, 2019
- The autonomous vehicle system in CILAB
AREA II - Machine Vision
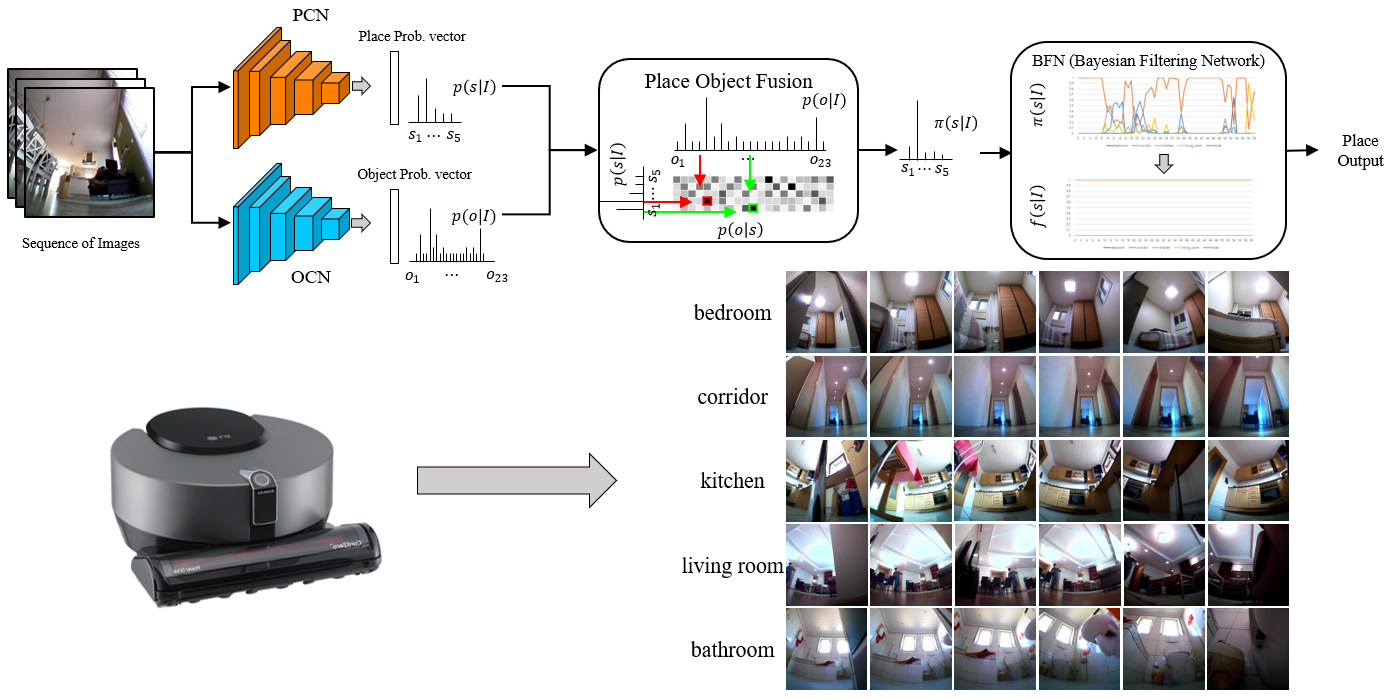
- Indoor Place Category Recognition for a Cleaning Robot by Fusing a Probabilistic Approach and Deep Learning, TCYB, 2021
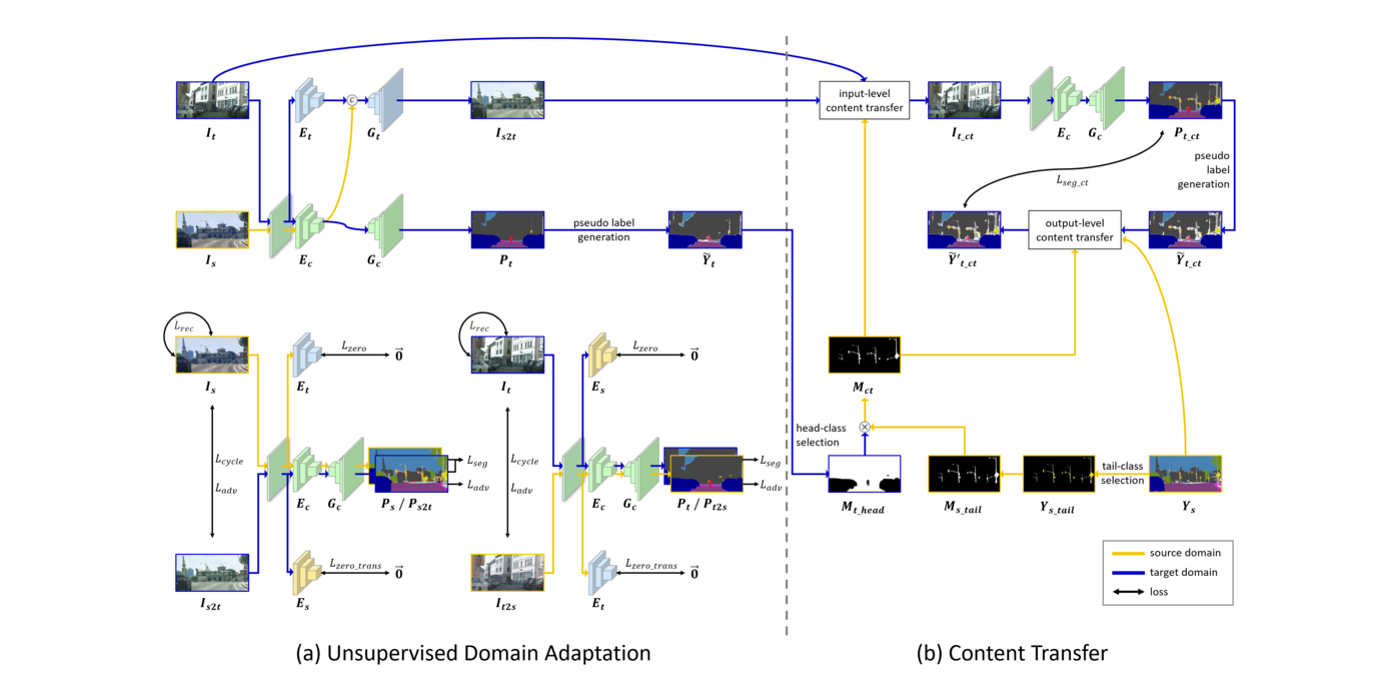
- Unsupervised Domain Adaptation for Semantic Segmentation by Content Transfer, AAAI, 2021
- Kernelized Memory Network for Video Object Segmentation, ECCV, 2020
AREA III - Mobile Robot Application
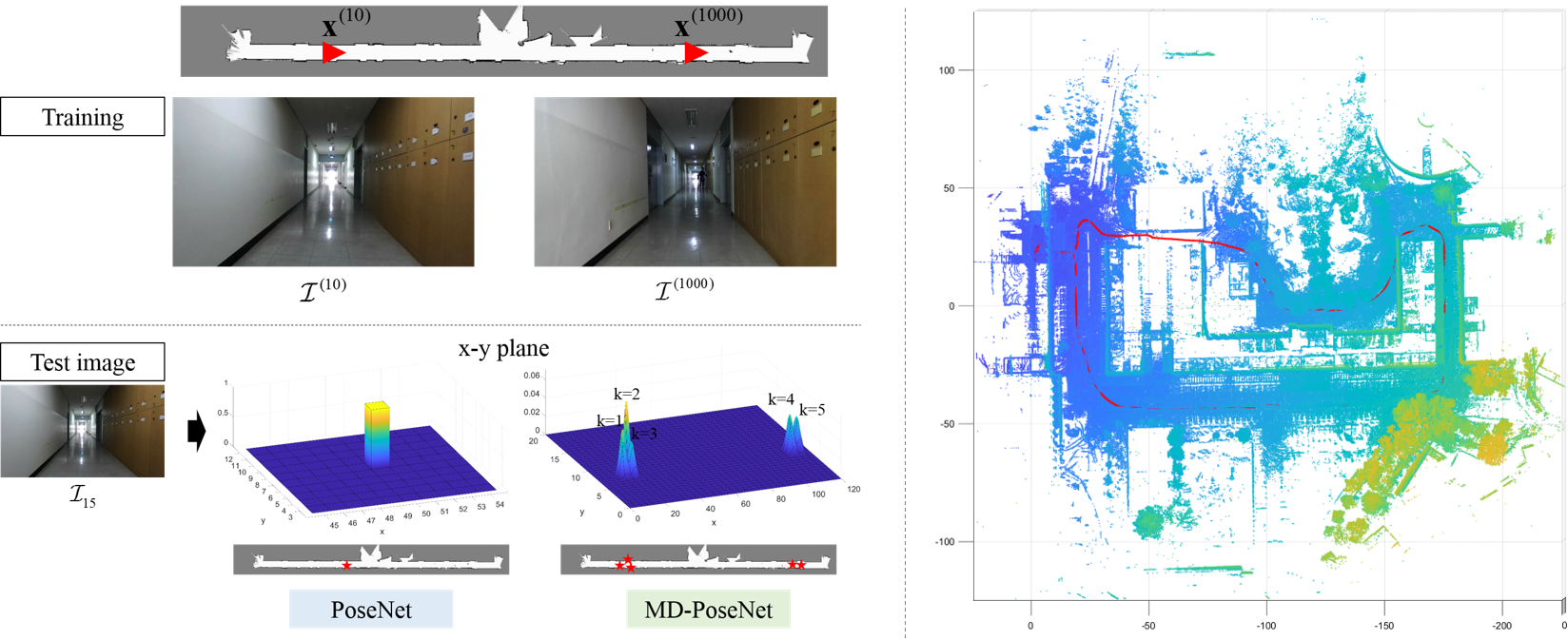
- 3D Mapping and Localization in BaekYang-Street, Yonsei University
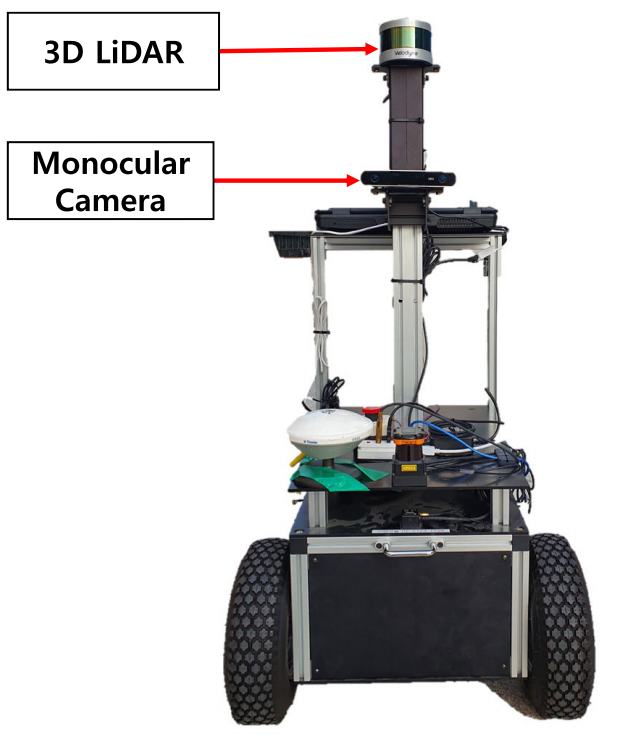
- Mixture Density-PoseNet and Its Application to Monocular Camera-based Global Localization, TII, 2020
- The mobile robot platform in CILAB